Hi, I'm Hun Kuk Park!
Robotics Graduate Student
Passionate about advancing robotics through innovative research and practical applications. Currently pursuing my graduate studies with a focus on safety-critical control.

Robotics Graduate Student
Passionate about advancing robotics through innovative research and practical applications. Currently pursuing my graduate studies with a focus on safety-critical control.
I am a second-year master's student in Robotics at the University of Michigan, Ann Arbor. I am currently working in the Distributed Autonomous Systems and Control (DASC) Lab, advised by Prof. Dimitra Panagou. I completed my B.S. in Robotics Engineering (Information Control) at Kwangwoon University, Seoul in 2023.
My research interests span across autonomous navigation, with particular emphasis on safety-critical control, path and motion planning. With a strong foundation in control theory, I am passionate about developing innovative solutions that bridge the gap between theoretical research and practical applications in robotics and automation. Moving forward, I strive to integrate learning-based control to push the limits of robot capabilities and enable advanced desicion-making process.
Years of Research
Projects Completed
Publications
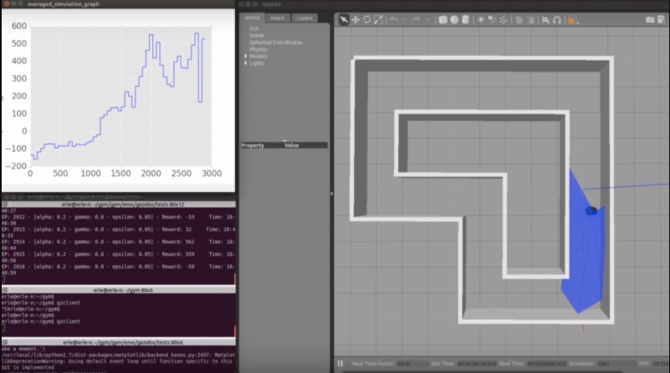
Developing algorithms for autonomous robot navigation in dynamic environments using path and motion planning techniques.
Developing robust control algorithms to ensure safe operation of autonomous systems in complex, dynamic environments.
Applying machine learning and neural networks to improve robot decision-making and control systems.
Research in robotic manipulation, grasping, and human-robot interaction for service and industrial applications.
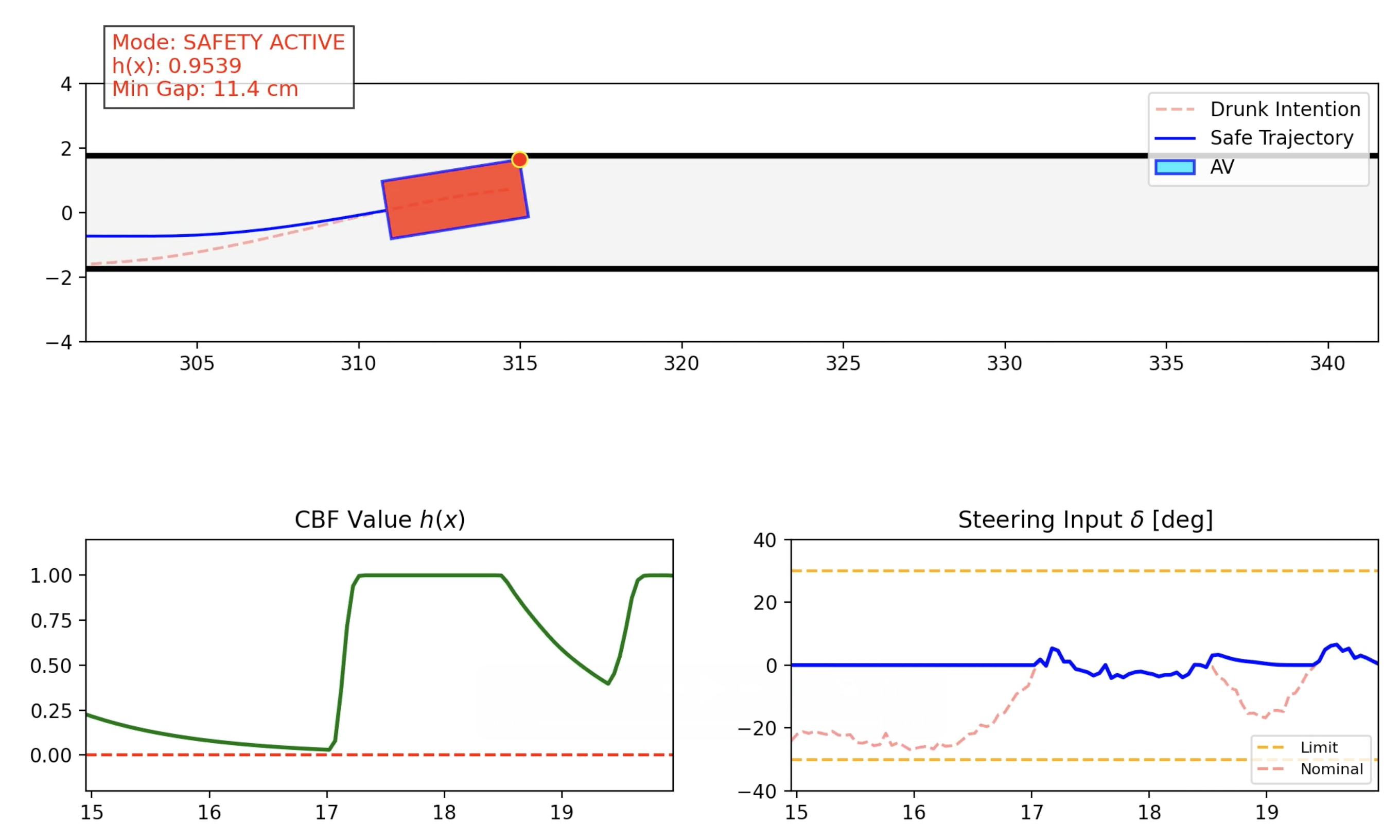
Developed a safe autonomous driving focused on bridging the gap between HJ reachability anlaysis and a valid safety filter.
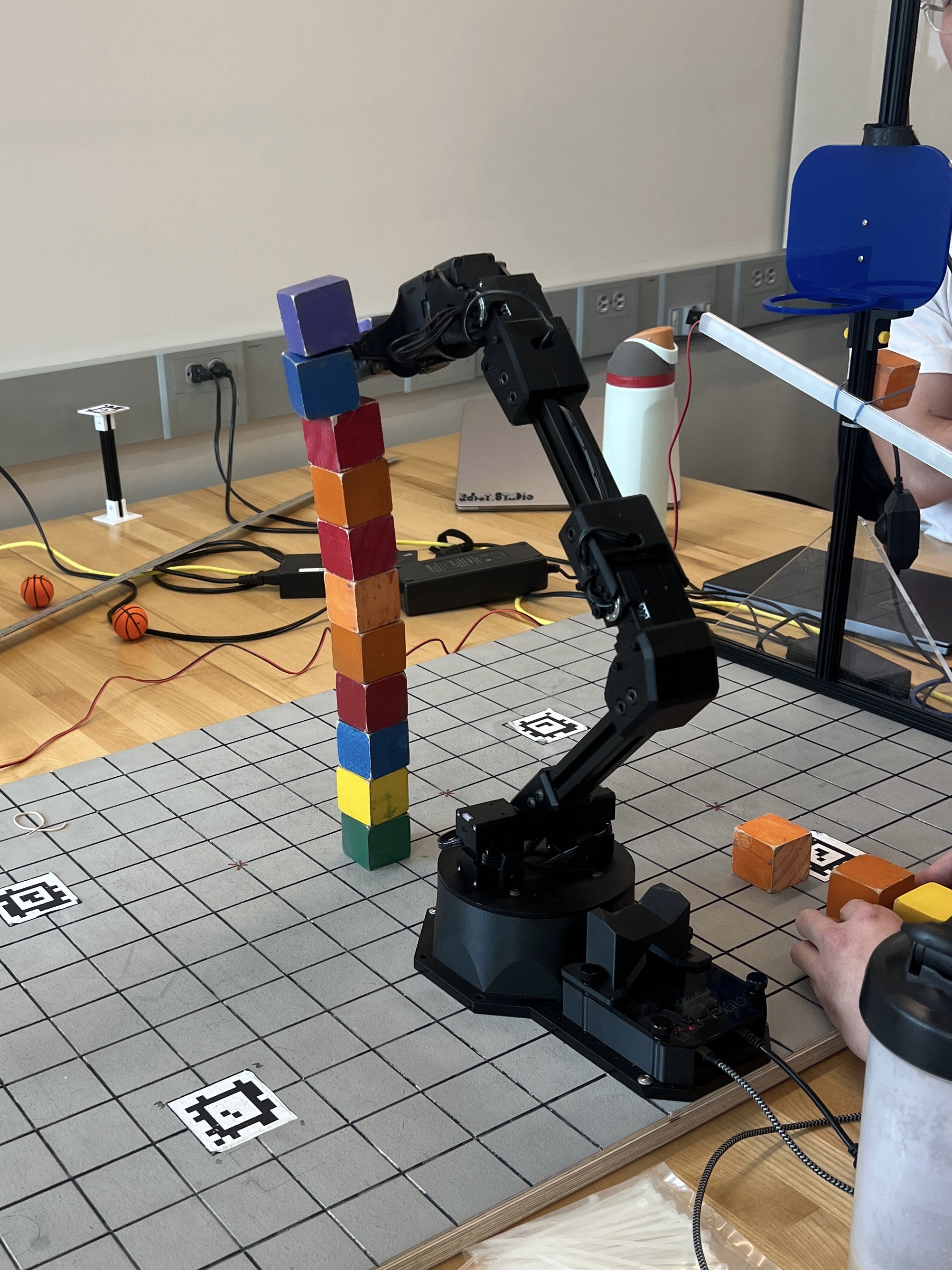
Developed computer vision algorithns and work with the kinematics of a 5-DOF manipulator to detect and manipulate blocks on a board within the reach of the robot arm.

Proposed an automatic disposable cup separation return that can automatically return, seperate and wash disposable cups.
Created a real-time object recognition system using deep learning for robotic applications.

IEEE International Conference on Robotics and Automation (ICRA), 2026
I'm always interested in discussing robotics research, potential collaborations, or career opportunities.